Recherche manuelle de l’emplacement du robot
A l’aide des différents boutons du panel de déplacement (figure V.7), l’utilisateur cherche un positionnement adéquat du robot. Le rectangle de l’atteignabilité globale change de couleur en fonction change de couleur en fonction du positionnement du robot et de l’atteignabilité constatée des différents points sélectionnés précédemment.
La légende des couleurs de cet indicateur est indiquée dans la partie basse de l’onglet :
- Vert : tous les points sélectionnés sont complètement atteignables et il existe au moins une configuration commune pour le robot
- Jaune : tous les points sélectionnés sont complètement atteignables et mais il n’y a pas de configuration commune pour le robot
- Orange : Certains points de la sélection ne sont pas complètement attaignables (limite de singularité ou postures proche des butées)
- Rouge : certains points de la sélection ne sont pas atteignables
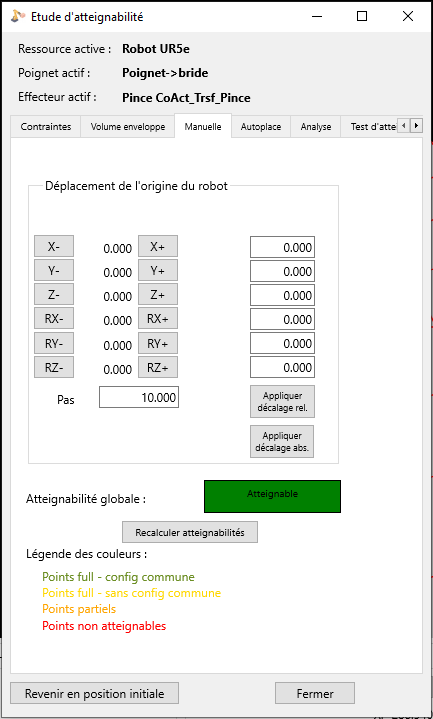
Figure V.7. : Positionnement manuel du robot dans l’environnement
Créé avec HelpNDoc Personal Edition: Maximisez vos capacités de documentation avec l'interface utilisateur conviviale de HelpNDoc