Sélection des points de travail à vérifier (à atteindre)
Ce premier onglet du formulaire (figure V.6) permet à l’utilisateur de choisir les points de référence (cibles) qui vont permettre de positionner au mieux le robot à placer (cibles). L'atteignabilité d'un point par le robot dans sa position actuelle est indiquée par un symbole avant son nom dans la liste de repères :
- ! : le point n'est pas atteignable avec ce robot muni de cet outil depuis cet emplacement
- a : le point est pas atteignable partiellement (toutes les configurations ne sont pas possibles)
- S : limite de singularité pour atteindre le point
- A : le point est atteignable dans toutes les postures, sans restriction
- @ : le point est déjà atteint par le robot avec son outil.
De plus, l’utilisateur indique également comme contrainte sur le robot :
- les limites de ses axes qu’il ne souhaite pas dépasser (en % de leur amplitude)
- la limite des valeurs des axes à ne pas dépasser autour des points de singularité (en degrés)
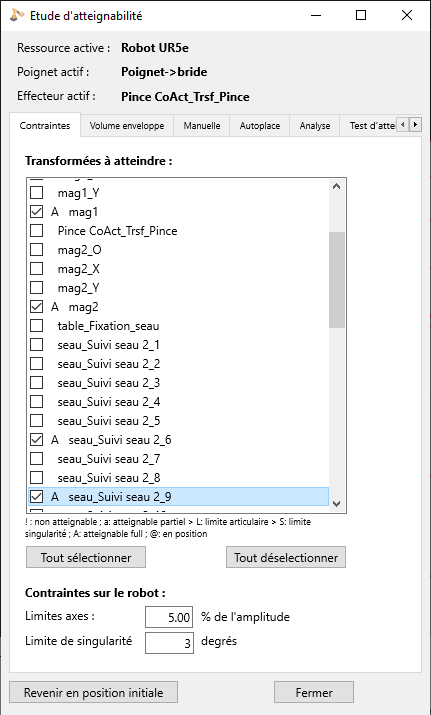
Figure V.6. : Sélection des points à atteindre
Créé avec HelpNDoc Personal Edition: Maximisez votre productivité avec l'interface utilisateur efficace de HelpNDoc