Recherche automatisée de l’emplacement du robot ou « autoplace »
Cet onglet permet de définir une collection de points de placement du robot selon une grille (appelés ici « emplacements »). Cette grille est définie par un nombre d’emplacements répartis uniformément autour de la position originelle du robot, selon un décalage en translation selon les axes X, Y et Z du pied du robot. Imposer également des rotations du robot autour des emplacements n’est pas réalisé aujourd’hui, pour des raisons de combinatoire très importante de la procédure (figure V.8).
Une fois la grille de recherche définie, la procédure calcule pour chaque emplacement, pour chaque point de la recherche, les différentes postures possibles du robot et classe les différents points selon les résultats obtenus :
- Rouge : nombre d’emplacements où le robot n’atteint pas tous les cibles à atteindre
- Orange : les cibles dont l’atteignabilité est partielle, à savoir :
- Jaune : les emplacements où les cibles présentent au moins une configuration commune
- Jaune : les emplacements où pour chaque cible au moins une posture n’atteint pas les limites sur les butées
- Jaune : les emplacements où pour chaque cible au moins une posture n’atteint pas la proximité de singularité
- Vert : le nombre d’emplacements où le robot atteint toutes les cibles sans aucune restriction (cas assez rare dans la réalité)
Lorsque le nombre d’emplacements « full atteignabilité » (vert) est nul, l’utilisateur peut réaliser une intersection entre les différents sous-ensembles d’emplacements d’atteignabilité partielle (jaune) afin de regrouper le maximum d’avantages sur les points restants.
Au fur et à mesure de ses sélections, l’utilisateur peut sélectionner les emplacements restants dans la liste en partie basse, et positionner le robot sur l’emplacement sélectionné à l’aide du bouton « Positionner le robot sur le point choisi »
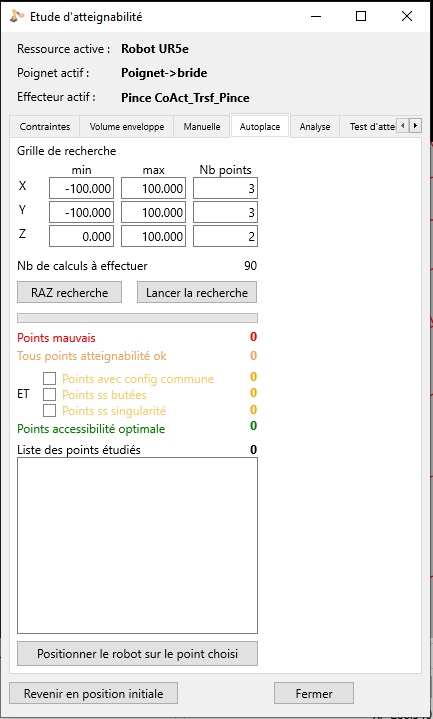
Figure V.8. : Recherche automatique du positionnement du robot dans l’environnement
|
|
Attention ! L’algorithme « autoplace » de placement automatique de robot est largement combinatoire ; il est donc fortement conseillé, lors d’une recherche, d’évaluer son temps global d’exécution. Plusieurs heures de calculs peuvent être nécessaires. |

Créé avec HelpNDoc Personal Edition: Convertissez rapidement et facilement votre document Word en eBook ePub ou Kindle