Test d’atteignabilité réelle
Lorsque le robot est positionné à un emplacement satisfaisant, l’utilisateur peut tester visuellement l’atteignabilité ce chaque cible (figure V.89 en sélectionnant l’une d’entre elles, puis une des configurations possibles. Ces deux sélections positionnent le robot depuis l’emplacement choisi, sur la cible choisie selon la configuration choisie.
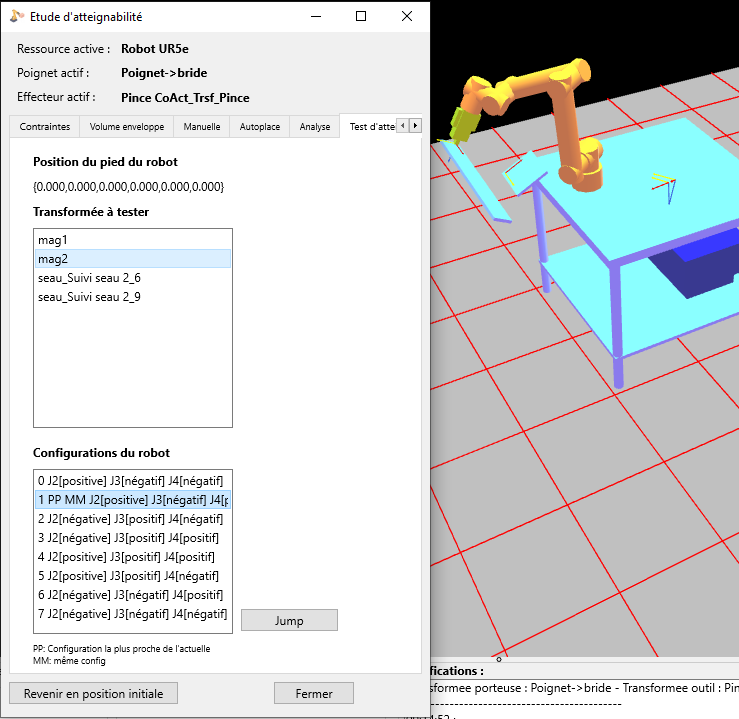
Figure V.9. : Vérification de l’atteignabilité des points en fonction du repositionnement du robot
Créé avec HelpNDoc Personal Edition: Optimisez sans effort votre site Web de documentation pour les moteurs de recherche