Menu "Environnement"
Les objets créés en CAO sont placés sur des repères définis par l’utilisateur. Ces repères sont reliés entre eux sous la forme d’une arborescence, au fur et à mesure de l’implantation de ceux-ci par l’utilisateur. Le premier repère de cette arborescence, toujours présent, est l’origine de l’environnement baptisé « monde ». La figure I.3. représente un exemple d’arborescence :
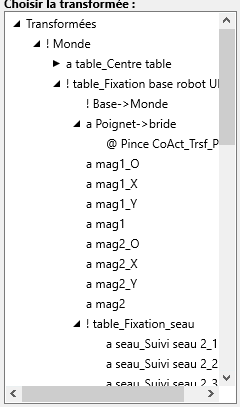
Figure I.2 : Extension utilisées par le logiciel
Ainsi, on constate qu’il y a un repère d’origine unique (Monde) dont la transformée associée est nulle. Chaque autre repère est défini par rapport à son ancêtre direct (son père) par une transformée simple. Chaque repère peut être aisément défini par rapport à n’importe quel autre par ce système.
A noter que dans le cas d’un robot, par exemple, la position du poignet sera définie par rapport au monde du robot par la posture qui sera fixée à un instant donné au robot.
|
|
Attention ! Les notions de repère et de transformée sont confondues ; en effet, la transformée qui permet de positionner un repère par rapport à son père est unique. Donc à tout repère ne correspond qu’une seule transformée. |

Créé avec HelpNDoc Personal Edition: Faites de la documentation un jeu d'enfant avec un outil de création d'aide