Mode "Jog"
Le mode de déplacement en "Jog" (figure V.2) peut être réalisé soit (zone de sélection "Type de mouvement") :
- en "articulaire", et on pilote les axes du robot
- en mode "cartésien" selon un repère à choisir : "Monde Celule", "Outil" ou un autre repère de la cellule à définir.
En fonction du mode de déplacement choisi, les boutons de commande changent de signification (axe choisi ou mouvement cartésien choisi).
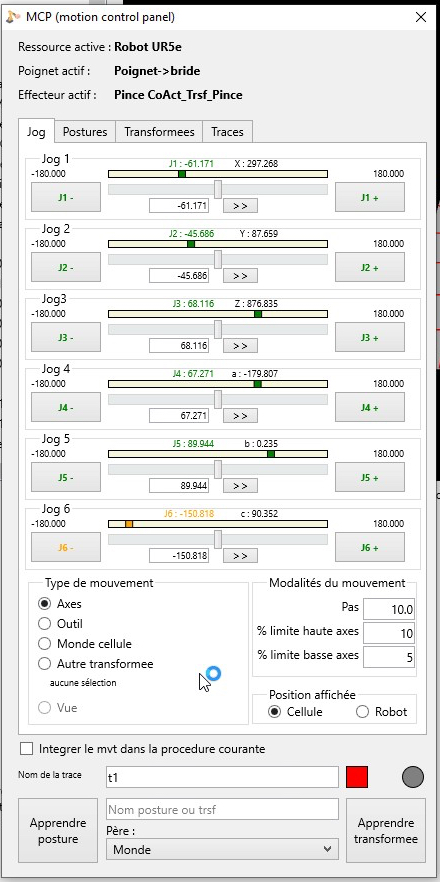
Figure V.2. : MCP en mode "jog"
Créé avec HelpNDoc Personal Edition: Maximisez votre productivité avec l'interface utilisateur efficace de HelpNDoc